 Repeatability
of GPS tracks for the Abingdon 4.5k loopRepeatability
of GPS tracks for the Abingdon 4.5k loop
Repeatability
of GPS tracks for the Abingdon 4.5k loopRepeatability
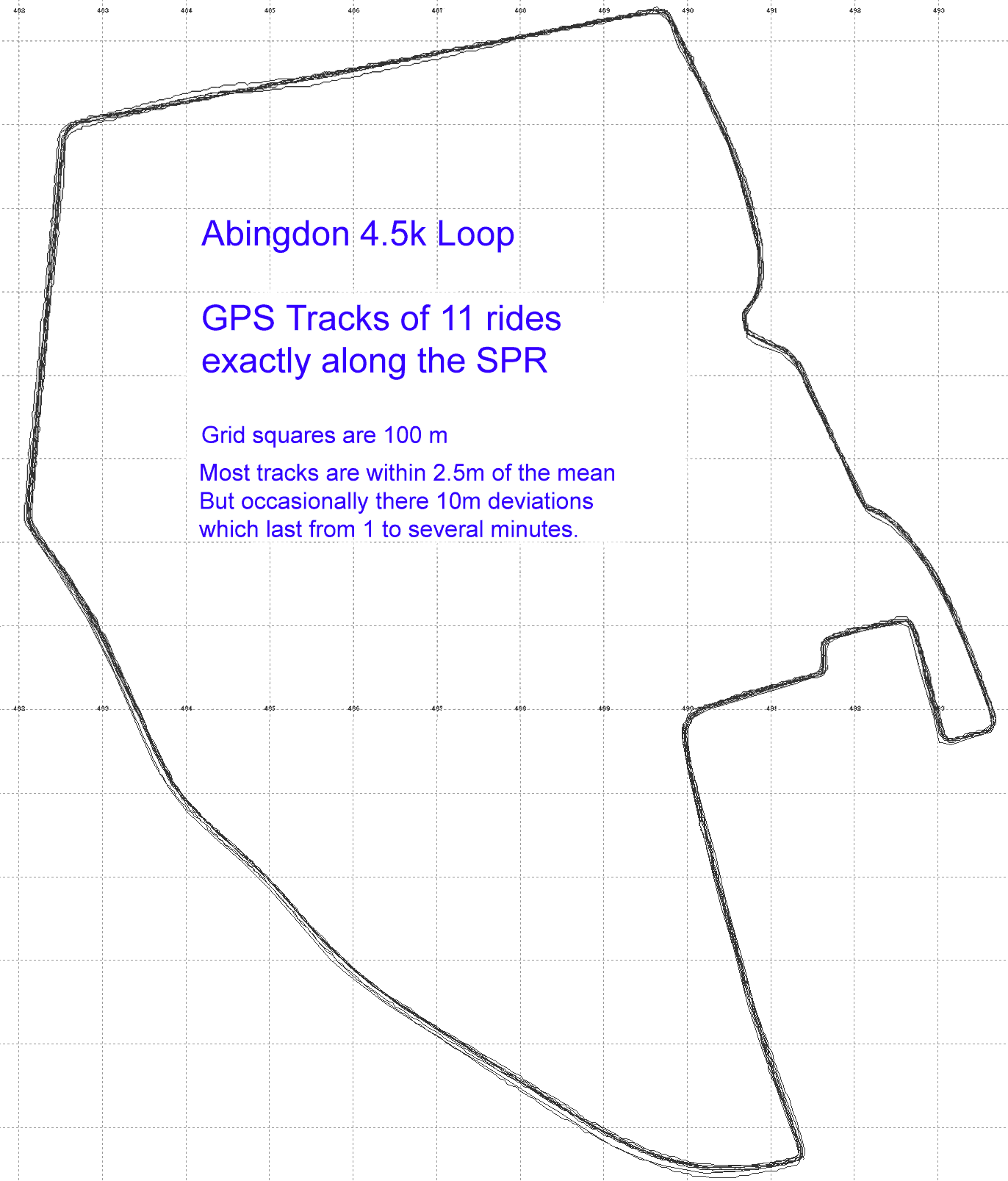
of GPS tracks for the Abingdon 4.5k loopI have used the Abingdon Loop for 15 years in my studies of course measuring. Since 1997 it has also been used many other course measurers During final training or tests for upgrading to UKA Grade1 measurer. It also been measured by IAAF grade A measurers. I have also measured the length along the SPR using a steel tape. measurers results scatter around the steel tape result of 4533.3m (without SCPF). As can be seen in the figure below there are a number of sharp bends and a few long sweeping curves. These have to be ridden quite accurately along the SPR to get consistent results, so the course is good for training purposes. I find my own rides with a given tyre have a scatter of about +/- 1m about the mean.
This course is very suitable for testing the performance of GPS units in recording the track, and also for checking the distances recorded by the GPS.
I have now ridden the Abingdon loop 11 times recording the tracks in my GPS. Here are the 11 tracks.
My ETREX H was set to record data every second during 7 of these rides. One can see zigzags of these tracks which are recorded to 1m in the active track log of the ETREX. In part these zigzags are due to the digitisation to 1m in the two coordinates, but also there is undoubtedly noise present in each sample which contributes to the zigzag.
During 4 of the rides I had the ETREX's track recording set to auto & high resolution. In this mode a much smaller number of track points are recorded. The difference between these settings can be seen in the following detail from two tracks:

Overall the tracks are very repeatable. Most fall within 5 m of the mean position. However occasional individual tracks diverge by up to 10 or 11 m from the mean. These divergences last for 100m to perhaps 1 km or more. For my bike's average speed of 4 m/s this corresponds to times of 25 seconds to 4 or more minutes. It is assumed these fluctuations are characteristic of long term errors such as might be caused by atmospheric or ionospheric irregularities, or possible due to a temporarily less favorourable configuration of the satellite constellation.
Two recording settings for the ETREX H were compared.
In the Auto, high resolution mode, points are recorded when the general direction of motion changes. When I was riding along a straight line this resulted in points every 50 to 100 m. I don't think I was deviating from a straight line. It is more likely that a higher than usual fluctuation of a GPS determined position resulted in a point being recorded too far off the straight line I was riding and this caused the ETREX's software to start a new line in a very slightly different direction. When going round corners while in the auto mode, points are recorded much more frequently. However, by comparing with the 1 per second track, it is obvious that the auto mode does not follow the corners so well and so summing the track legs in the auto mode will tend to give a slightly shorter distance than the true distance.
In the 1 per second mode, points are recorded every second, and the track has a zig zag appearance in part due to the rounding to 1m. However the track follows round the corners more accurately than the auto mode. Summing the zigzag track lengths will clearly add distance and give a long course..
The above predictions about track distance will be compared with my experimental data on a later page, but before I turn to that, I want to use the data I collected on the scatter of way point readings to estimate how accurately I would expect the GPS to be able to measure the Abingdon loop. After that I will compare these prediction with my actual measurements of distance.
I will next need to model the Abingdon loop and run simulations of rides in a similar way to what I did earlier for a number a simple regular polygon configurations.
Mike Sandford - 2 April 2009